
GRAF
University of Tübingen
Motivation
- 传统的图像生成通常基于GAN网络,已经可以生成清晰足以以假乱真的图片,但是以这种方式学习得到的模型忽视了生成因素(与人类理解或绘制一张图的方式相比),比如光线与物体的关系等等(文章中表述为潜在因素)。
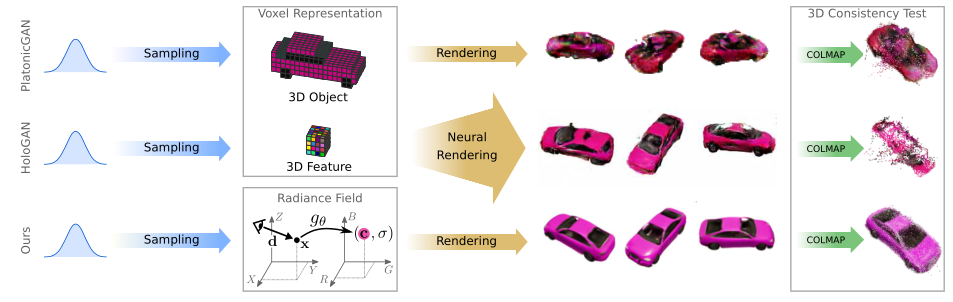
- 近期有工作提出了3D感知图像生成,在生成图像时考虑了相机的姿态,使用可微渲染技术显式映射到图像,从而提供对场景内容和视点的控制。但是真实的3D图像难以得到,因此一般采用2D的图像进行监督,获得2D图像的方式一般需要:离散化3D表示,比如中间特征(HoloGAN)或者完整的3D特征(PlatonicGAN)的体素网络。若采用完整的体素网络表示,体素的表示的三次内存增长将限制为低分辨率并导致可见伪影;相反虽然中间特征的体素网络更紧凑,但是这需要额外学习 3D 到 2D 的映射,以将抽象特征解码为 RGB 值,从而导致在高分辨率视图中表示的不一致性。
Contribution
- 本文证明了分辨率低(内存限制)、高分辨率的不一致性(中间表示的不足)可以用条件辐射场来解决。
- 具体的贡献:
- 提出了GRAF——基于未处理的图像,进行高分辨率的3D感知图像合成的辐射场的生成式模型(GAN)。除了改变视角,该模型还允许修改物体的形状和外观。
- 引入了一个基于补丁的判别器,它在多个尺度上对图像进行采样,是学习高分辨率生成性辐射场的关键。
Method
NeRF
- 首先介绍了NeRF的原理(本文方法的基石),很多文章都介绍过了,所以略过此部分。
Generative Radiance Fields
- 与NeRF的方式不同,GAN的方式不需要假设有大量的带有姿态信息的图像,而是通过“unposed images”来进行训练,并且能够生成新的场景。
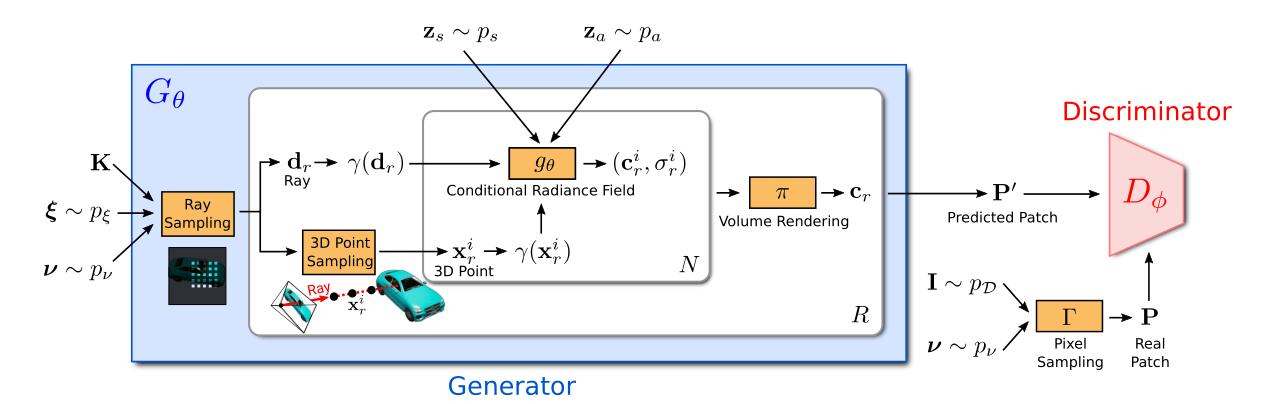
- 整个流程如下:
符号定义
-
涉及的符号有点多….
-
表示整个生成网络;表示鉴别器。
-
表示相机矩阵,它使得相机畸变中心(principle point)始终位于图像的中间。
-
表示从分布为分布采样得到的相机的姿态。这个分布是一个空间坐标系上半部的均匀分布,相机朝向为坐标原点。
-
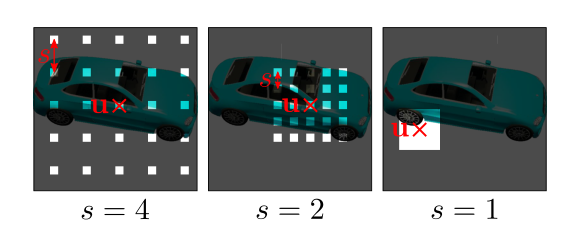
假设采样的图像补丁(patch)大小为。代表二维(即图像平面)的采样方式,具体来说,表示采样中心的坐标,代表了图像补丁的尺度。其中,u服从整个图像域上的均匀分布,尺度s服从的均匀分布,。
-
与分别表示形状与外观的“码”(code),二者都服从标准的高斯分布(即均值为0 方差为1的正态分布)。
-
与分别表示位置编码与方向编码(与NeRF相同)。
-
图像I的真实分布记为。
-
Generator
Ray Sampling
-
具体而言,图像补丁如下定义:
它描述了像素的位置。由上式可以看出,即是与s和u有关的坐标,前者是缩放,后者为中心偏移。注意的是x与y都是连续的量,这样可以连续地评估辐射场。
-
每一条光线都由、相机姿态、和矩阵K决定。
-
用r表示像素/射线,用表示归一化之后的射线,R表示射线的数量,其中训练时(减少开销与提升速度),推理时。
3D Point Sampling
- 与NeRF的做法一致,都是采用分层抽样的方式。
Conditional Radiance Field
- 条件辐射场:
-
与NeRF的辐射场(输入为体密度和颜色)不同,本文提出的方法还需要颜色码和外观码控制,所以叫做条件辐射场(好牵强- -b)。
-
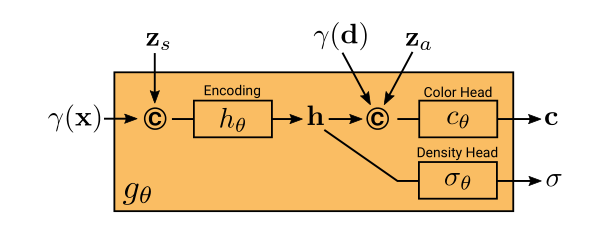
这一部分是唯一需要学习的,流程大致为:
- 首先位置编码与形状码一起输入计算得到形状编码h,网络内有一个被称为密度头(density head)的部分,将h转换为体密度。
- h和方向编码、外观码一起,通过一个被称为颜色头(color head)的部分,被转化为颜色c。
- 这些部分都是由全连接网络实现的,使用ReLU作为激活函数。
-
从整个流程来看:
- 首先,体密度也就是形状的预测与颜色无关(从直观上来讲,形状本身也与颜色无关)。体密度的预测独立于颜色(外观),以期能够保证多视图的一致性。
- 其次,对于颜色的预测,它不仅依赖于视角d与颜色码,还依赖于形状(从直观上讲,首先一个物体不同位置的颜色可能不一样,其次由于光线影响,不同视角的观察到的颜色也有区别),以此建模为视角依赖的外观(比如镜面反射)。
- 这种方式可以使得外观码与形状码能够分别独立地控制形状与外观。
-
将其数学化表示,即:
Volume Rendering
- 使用与NeRF相同的体渲染方式,对每一条射线上的采样点进行计算,得到颜色值,将所有的预测位置结合之后,得到了预测的图像补丁(这个补丁所处位置的颜色)。
Discriminator
- 鉴别器首先要获得真实图像分布下的补丁(patch),与生成器的操作相同,根据确定采样的位置与缩放,然后使用双线性插值的方式获得对应处的真实补丁。为了与生成器做区分,使用表示鉴别器的双线性插值采样方式。
- 鉴别器的思路来源于PatchGAN,与其不同的是,本文的方法是连续的坐标以及多种s(PatchGAN将s固定为1)。从采样示例图可以看出,采样的过程不会基于s对真实图像进行下采样,而是在稀疏位置采样以保留高频的信息。
- 鉴别器是一个卷积神经网络,而且只使用一个共享权重的鉴别器即可适用于不同图像补丁。
- 缩放比例s决定了补丁的感受野。为了促进训练,先从较大的感受野的补丁开始以捕获全局上下文相关信息。接着逐步对具有较小感受野的补丁进行采样,以优化局部细节。
Train
- 使用具有R1正则化的非饱和GAN目标来训练:
其中, 表示正则化的强度。并且在判别器中使用光谱归一化(spectral normalization)和实例归一化(instance normalization)。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 CoorDi's Blog!